ANC(アクティブ騒音制御)とはANC 101
ANC(アクティブ騒音制御)の基本
ANCの必須事項
ANCを設置してたったの1dB(?)
ANC(アクティブ騒音制御)の基本
アクティブ騒音制御(能動的騒音制御 ANC: Active Noise Control)は、騒音と180度位相が異なる逆位相の音を制御スピーカーから出力することで実現します。 騒音は時々刻々と周波数、位相そして振幅も変化するため、それを打ち消す制御音もそれに応じて変化させる必要があります。
制御装置は騒音源の近傍に設置したマイクからレファランス信号を入力し、制御音を計算により作り出します。 また騒音源からある程度離れた場所(制御スピーカより下流側)に設置したマイクからエラー信号を入力し、そのエラー信号が最小となるように、常時”学習”をしながら最適な制御信号を算出します。 つまり簡単なAIのような機能を持ちます。 騒音の周波数や振幅が変化しても、周囲の騒音が増音しないように瞬時に追従する能力が必要です。
空調ダクトでのフィードフォワード騒音制御システム
古くからある一次元の騒音制御システムです。 騒音の上流に配置したマイクからレファランス信号(参照信号)を入力し、二次音源(制御音源)から出力する逆位相音を計算します。 また下流にあるマイクからエラー信号(評価点)を入力し、評価点におけるエラー信号パワーが最小となるように学習し制御特性を変化させます。 ここで、騒音制御の効果がでるのはダクトの内部で騒音波面が平面波となる周波数帯域のみです。 たとえばダクト径が1mのとき、170Hzまでの帯域のみ制御可能です。
フィードフォワード制御
騒音がランダム信号である場合、騒音源に近い上流にマイクを設置し、先回りをした逆位相制御音で騒音を打ち消します。 これをフィードフォワード制御と呼びます。 空調ダクトや防音壁に使われているシステムです。
防音壁の上部に制御スピーカー数個を並べて設置し、上流側のマイクからレファランス信号を入力し防音壁の下流側を制御します。 このときスピーカー間隔は対象となる騒音の波長の1/4の間隔で並べる必要があります。 例えば騒音の周波数が100Hzのとき、80cm間隔以下でスピーカーを並べます。 スピーカーの数は制御範囲の横方向距離分が必要です。 ANC-Octetは、8個の制御スピーカーから構成されます。
原理的に騒音源から遠く離れた範囲を制御しようとすると、制御範囲を広げることができます。 防音壁の必要がなくなります。 この場合、騒音がすでに平面波となるような離れた位置に制御スピーカーを真横に並べます。 制御スピーカー・アレーを騒音源からはなすことにより、騒音の距離減衰とスピーカー・アレーの制御音との距離減衰が似てくるため制御範囲を広げることができます。
フィードバック制御

騒音が周期性信号である場合、騒音源に近い場所に制御スピーカーを設置し、一周期遅れの逆位相制御音で騒音を打ち消します。 これをフィードバック制御と呼びます。 ディーゼルエンジンなどの排気音の減音に使われます。 三次元的に音響パワーを下げることができるので大きな効果を期待できますが、騒音源のパワーに相当する大出力の制御スピーカーが必要となります。 ANC-Duoは、建設機械の大音響パワーに打ち勝つパワーアンプと2個のスピーカーから構成されます。
制御スピーカーはできるだけ騒音源に近づける必要があります。 通常、対象となる騒音の波長の1/4以内に、騒音源を中心として点対称位置に二つの制御スピーカーを設置します(騒音が100Hzのとき、80cm以内に設置)。 制御点として2個のエラーマイクを騒音の下流側に設置します。 二つの制御スピーカーから出力された合成波を、騒音源の周囲となる2点で波面を合わせて打ち消すことで、制御点から遠方の全ての領域で減音できることになります。
ANCの必須事項
音の伝搬方向へ制御(上流から下流へ)
騒音の伝搬方向とは異なる方向に制御しようとすると、干渉縞ができ、増音箇所が発生します。
騒音と制御音の曲率を合わせる(波面を合わせる)
制御スピーカーが騒音源から離れている場合、広範囲で波面を合わせるために複数個の制御スピーカーが必要です。
直接音のみの制御
反射音を制御しようとすると、騒音の伝搬方向とは異なる方向から制御することになり、干渉縞ができて増音箇所が生じます。 制御スピーカーを騒音源に近接させることで、直接音と反射音を同時に減音させることができます。
ANCを設置してたったの1dB(?)
ANCを設置したけれど
ANC装置を設置して、工場や工事現場の敷地境界で騒音計でその効果を計測します。 ANCをON/OFFして騒音レベルの差を見てみると1〜2dB(A)程度、またはほとんど誤差範囲しかない...と言うことは良くあります。 ON/OFF時の差を聞いてみても、よく分からないと感じます。では、高価なANC装置を設置する価値はそれほどないものなのでしょうか
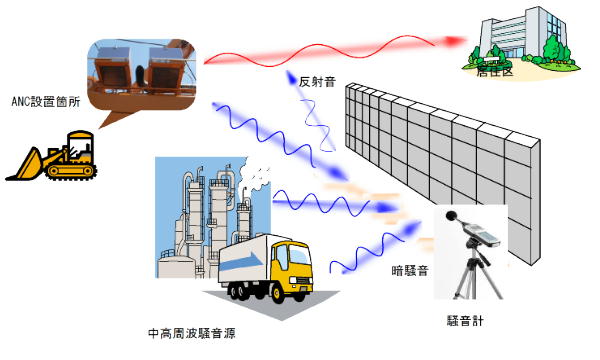
計測点とANC装置は離れており、計測点の近くには他の騒音源があるため、敷地境界ではそれらの暗騒音によって騒音レベルが上がります。
聞いた感じで変わらなくなるのは、暗騒音によるマスキング効果も原因の一つになります。
本当にANCの効果は小さいのか、以下の実験で確かめます。
減音量1dB(A)の意味
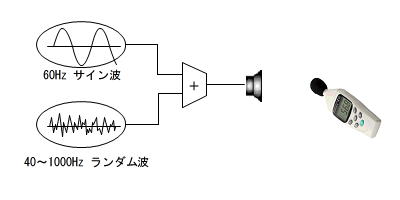
敷地境界で1dB(A)の減音効果の"意味"を下記実験で確認します。(1) 実験方法
a) 暗騒音として、40Hz〜1KHz帯域のランダム信号をスピーカーから出力し、約60dB(A)となるようにレベルを調整します。
b) 低周波騒音として、60Hzのサイン波をランダム波にミックスしてスピーカーから出力し、約1dB(A)増音するレベル 61dB(A)になるようにサイン波レベルを調整します。
(2) 騒音レベルの差
| 単位 | 60Hz有り | 60Hz無し | 差 |
| dB(A) | 61 | 60 | 1 |
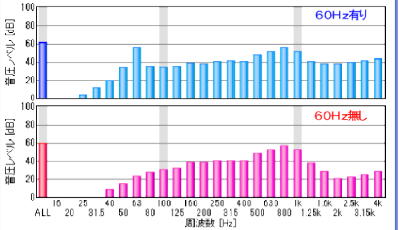
63Hz帯域の低周波帯域が、僅かに出っ張っているのが分かります。
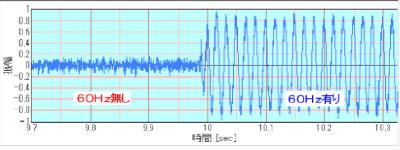
(3) 時間波形
低周波音により相当な不快感が感じられ長時間は我慢できない状況ですが、それでも1dB(A)の差しかないとはどうしてなのでしょうか。
上記実験時のマイク入力の時間波形を、低周波音の有無時において表示します。 時間波形では、歴然とした差を観測することが出来ます(!)。
(4) A特性での騒音計測
日本では騒音計測に、「人間が感じる音の大きさに等しい量を計測するようにA特性」を用います。 A特性(JIS)では、測定された音圧から下表の補正値を差し引きます。
| A特性補正値(JIS)抜粋 | |
|---|---|
| 中心周波数(Hz) | 補正値(dB) |
| 50 | -30.2 |
| 63 | -26.2 |
| 80 | -22.5 |
| 100 | -19.1 |
| 125 | -16.1 |
| 160 | -13.4 |
| 200 | -10.9 |
| ... | ... |
| 1000 | 0 |
低周波騒音の63Hz帯域では、26.2dB 差し引くことになっています。 だから60Hzの騒音レベルは際立っていないようにグラフで表れます。
(5) A特性を外した音圧レベル
A特性重み付けを外して、平坦な特性として計測すると下記のようになります。 音圧レベルの差は 20dB にもなります。
| 単位 | 60Hz有り | 60Hz無し | 差 |
| dB(F) | 83 | 63 | 20 |
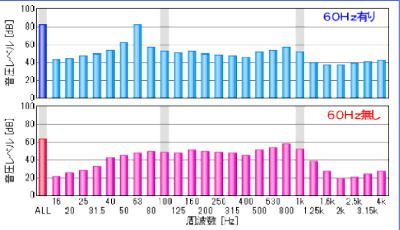
A特性で評価することで、減音量が著しく劣って言うように見えることが分かります。 つまり、ANCによる効果がたったの 1dB しか無いように見えたものが、平坦な音圧レベルでは 20dB も減音していたことになります。
注意) 暗騒音を40〜1000Hzとして実験していますが、減音量は暗騒音によって変わります。
(6) 室内では
隣接する住宅の中では、壁や窓ガラスにより騒音は減衰します。 ただし、減衰するのは高周波領域であって、低周波数騒音は減衰せずに室内へ入り込みます。 ここで、A特性での騒音計測に戻り、同様の実験において暗騒音の帯域が中低周波数以下になったと仮定して低周波音の有無(ANC効果の有無)の差を計測します(A特性評価に戻る理由は、フラットな特性でON/OFF計測した場合、もとより減音効果が十分にあるからそれほど数値に差が出ません。 A特性の騒音計で計測した状況を再現しましょう)。
高周波領域が減衰した室内では、A特性で計測しても、低周波音の有無の差がはっきりしてきます。
| 暗騒音帯域(Hz) | 60Hz有り | 60Hz無し | 差 dB(A) |
|---|---|---|---|
| 40 - 1000 | 61 | 60 | 1 |
| 40 - 500 | 60 | 50 | 10 |
| 40 - 200 | 59 | 42 | 17 |
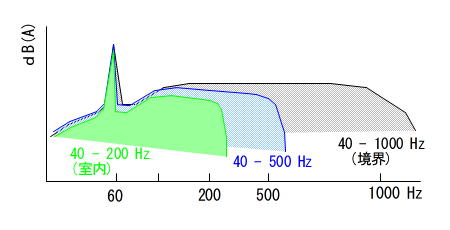
高周波音が既に減音している室内やビル陰では、ANC設置による効果がはっきり分かります。 暗騒音が200Hz程度の時は、室内では42dB(A)とかなり静かなのですが、60Hzの低周波騒音が入ってくると59dB(A)までに跳ね上がります。 しかも低周波音が強調されているため、人にとって不快な環境になります。
さらに低周波数騒音が厄介なのは、波長が普通の部屋の広さにちょうど一致してくるため定在波が発生し、状況を悪化させてしまうことです。
(7) 遠方では
騒音は大気中を伝搬するとき空気の粘性等により減衰しますが、減衰量は周波数により異なります。 高周波数は早く減衰しますが、低周波数はなかなか減衰しません。
大気中 4Km 遠方での周波数毎の減衰量(20℃、湿度50%) ISO 9613.1
| 周波数(Hz) | 50 | 160 | 500 | 1000 | 2000 | 4000 |
|---|---|---|---|---|---|---|
| 減衰量(dB) | 0.3 | 2.6 | 10.9 | 18.6 | 39 | 118 |
4Km遠方では低周波音はほとんど減衰しませんが、500Hzは10dBも減衰します。 たしかに遠く離れると低い音しか聞こえません。 低周波数騒音の対策が如何に大事かが分かります。
バナースペース
株式会社ANCラボ
〒651-1123
神戸市北区ひよどり台5-12-44